线下决赛赛道2:弱小目标检测跟踪
(1)赛道背景
卫星视频在目标监测、应急响应与智能感知等领域展现出巨大潜力。基于高清遥感视频的目标检测跟踪对提升交通监控效率、优化智慧城市管理具有重要意义。然而,遥感视频中地面目标尺寸小、信噪比低、背景复杂导致判别特征鲁棒性差,检测与跟踪任务面临显著挑战。因此,大赛设置弱小目标检测跟踪赛道,致力于遴选出先进(检测跟踪准确性高、算法复杂度低)的弱小目标检测跟踪算法,准确识别出高清光学卫星视频数据中运动目标(车辆、飞机、舰船)位置并持续跟踪,拓展遥感视频实际应用场景,提升交通监测及路网管理效率。
(2)赛道任务
弱小目标识别赛道要求选手对道路上的车辆小目弱小目标识别赛道要求选手对道路上的车辆小目标进行检测与跟踪,输出目标检测与跟踪目标框。选手使用主办方提供的训练数据集,训练并提交模型。主办方在测试数据集上测试算法检测与跟踪性能,依据评分标准对结果进行综合评价。依据算法的综合表现,设立赛题如下:
a. 初赛:算法在测试数据集上的弱小目标检测性能和跟踪能力。
b. 复赛:算法在扩展测试数据集上的弱小目标检测和跟踪能力,同时考察算法在抖动、平台抖动、云雾干扰等条件下的适应性。
c. 决赛:算法在进一步扩展的测试数据集上的综合表现,进一步考察算法在流量缓慢密度大、平台抖动、云雾干扰等条件下的适应性以及算法运行效率。
(3)数据简介
规模:总计50-100条包含道路运动车辆的遥感视频数据及其标注数据;
用途:动态交通监控、智慧城市。
(4)数据说明
a.原始影像:影像为一系列连续的卫星图像,包含R、G、B三个波段。
b.标签数据:标签格式为边界框注释,包含帧号、目标ID、边界框位置、边界框宽高等内容。
c. 参赛者不得在未获得主办方许可前使用该数据集发表相应的研究成果。
(5)提交要求
提交.zip格式压缩包,可解压缩出results文件夹,results文件夹中为val文件的测试结果。
(6)提交示例
results.zip内容为:
results
——1-1.txt
——1-2.txt
......
txt文件内容示例如下:
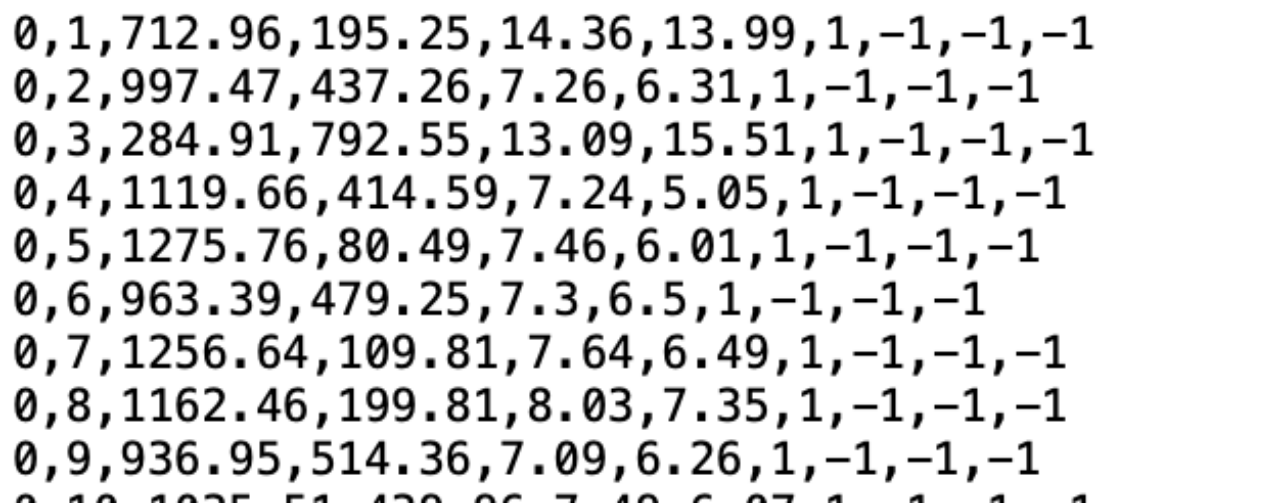
每列依次为帧号、目标ID、边界框左上角的X坐标、边界框左上角的Y坐标、边界框的宽度、边界框的高度、目标类别(固定为1代表车辆)、-1、-1、-1。
(7)评测标准
score =(MOTA+IDF1)/2
采用MOTA和IDF1指标考察识别结果,综合权重分别为50%和50%,重点考察弱小目标能否实时检测跟踪,以及是否产生大量虚警。